Exercise UNMANNED WARRIOR: an international exercise using autonomous tech to detect underwater mines
From Defence Research and Development Canada
December 13, 2016
The area surrounding Scotland’s Isle of Skye was speckled with ships, and unmanned vehicles in the sky, on the ocean’s surface and below it, all working together to detect and neutralize a minefield on the seafloor.
Transcript
Beginning of video
Intense music plays in the background, the video opens on the open water with mountains in the background, it is the area surrounding Scotland’s Isle of Skye. Text comes up on the screen in white font with a strip of black background behind it – “Exercise UNMANNED WARRIOR 2016, led by the United Kingdom’s Royal Navy”.
It cuts to a surface vehicle and a small manned boat next to it, text – “at the British Underwater Test and Evaluation Centre in Scotland,” tighter shots of the underwater vehicle being launched in the open water, followed by close up shots of the underwater vehicle text – “was one of the largest demonstrations of unmanned vehicles ever. Defence Research and Development Canada brought three vehicles to the international trial;”
Music builds in tempo; sounds of splashing can be heard as well, an underwater shot of the underwater vehicle, text - “two unmanned underwater vehicles called Iver3”, there is a shot of the underwater vehicle being launched.
Shots of the surface vehicle from afar, and closer up from different angles, text “one surface vehicle called the USV-2600. The experiment explored networking unmanned vehicles underwater and on the surface”.
A shot of the surface vehicle being launched, text – “to detect and neutralize and underwater minefield.”
Shots of two technologists wearing red hard hats guiding the surface vehicle to its resting spot on a boat while it is placed by a crane, followed by another shot of the technologists packing up the vehicle.
The music gradually dies down, Defence Research and Development Canada corporate signature appears on a black screen. Canada word mark appears on a black screen.
End of video

This was Exercise UNMANNED WARRIOR 2016 led by the United Kingdom’s Royal Navy at the British Underwater Test and Evaluation Centre in Scotland; one of the largest demonstrations of unmanned vehicles ever.
The Hell Bay portion of Ex UNMANNED WARRIOR took place from October 2-15 and was led by The Technical Cooperation Program (TTCP) Mine Warfare Technical Panel. TTCP is an international organization that collaborates in defence, scientific and technical information exchange and shared research activities for five nations: Australia, Canada, New Zealand, the United Kingdom (UK) and the United States (US). Four of the nations participated this year. This was the fourth and final trial in the Hell Bay series, all of which focused on unmanned vehicles used in mine counter-measures.
This year’s experiment explored, among other objectives, networking unmanned vehicles both below and on the water’s surface, to detect and neutralize an underwater minefield.
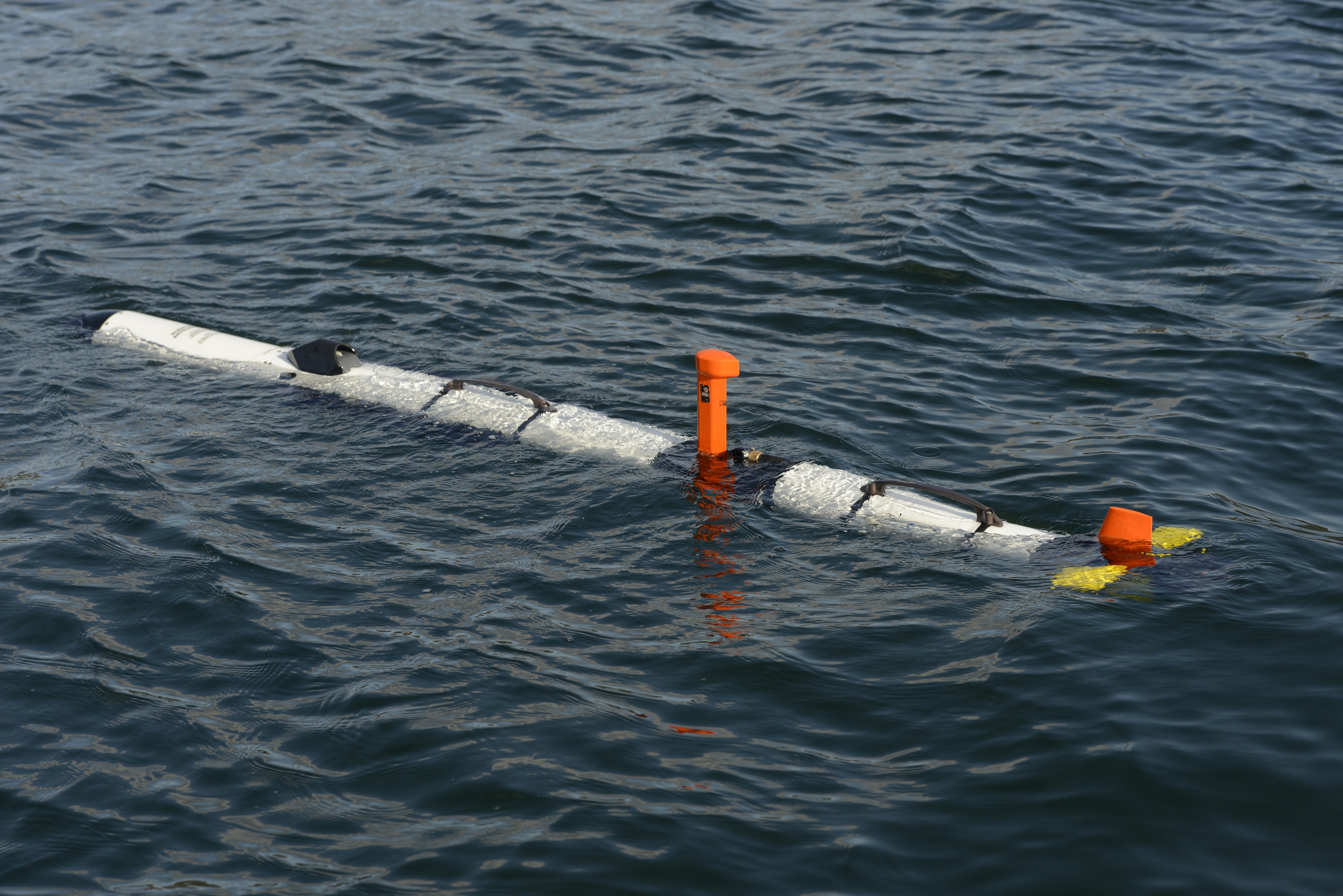
Defence Research and Development Canada (DRDC)’s team brought three vehicles: two unmanned underwater vehicles (UUV) called IVER3 UUV, and one surface vehicle called the USV-2600. Both underwater vehicles, which are torpedo-shaped free-swimming underwater robots, have side-scan sonars. The side-scan sonars use acoustic waves to take images of the seafloor, like an underwater camera, to look for underwater mines. The surface vehicle is able to communicate with the submerged vehicles to relay their detection information above-water to a circling unmanned aerial vehicle. The aerial vehicle can further relay the underwater vehicle’s detection information over to a command and control centre on the shore. Working together, the aerial and surface vehicle allows the underwater vehicles to stay submerged and not have to surface to share their detection information.
This capability was demonstrated with seven unmanned underwater vehicles, two unmanned surface vehicles, and one unmanned aerial vehicle in collaboration between Canada, the UK and the US.
“We were able to achieve some world-firsts,” said Dr. Mae Seto who was Canada’s lead scientist for the Hell Bay component of Ex UNMANNED WARRIOR. “Networking robots for a collaborative mission and showing the advantages of unmanned vehicles for naval mine counter-measures.”
One of the goals of the exercise was to test the interoperability between the vehicles brought to the trial by our allied partners. The testing included communications between unmanned vehicles, transmitting sonar images from underwater to above water, automatic target recognition of mine-like targets, and unmanned vehicles adapting to the actions of other unmanned vehicles.
“Our unmanned vehicles were able to interoperate with those from allied nations. The implication for the navies is that it is possible to network unmanned vehicles towards achieving a timely mission goal and to transmit the information from the underwater sensors to those who make the decisions,” said Dr. Seto.
DRDC’s participation in the exercise and the knowledge and experience passed on to the Canadian Armed Forces (CAF) informs them on the state-of-the-art possibilities and help inform their eventual decisions on procurement, training, concepts of operation, and the way-ahead for the role of unmanned vehicles, explains Dr. Seto.
“Ex UNMANNED WARRIOR was an ideal opportunity for our sailors and research teams to work together with allied forces. Exercises like these prepare us to better implement these technologies on our own or with our allies during operations,” said Lieutenant-Commander David Botting, the Director of Naval Requirements for Naval Mine Warfare.
Unmanned underwater vehicles are an example of emerging technology that the Royal Canadian Navy (RCN) can utilize to tackle underwater mine detection requirements, alongside manned vessels and trained RCN divers. These vehicles can be used not only to detect mines but in several other ways such as for underwater surveys to generate a map of our waterways that guide vessels to travel on a clear and safe path, described LCdr Botting.
The Hell Bay experiment at the heart of Ex UNMANNED WARRIOR is part of DRDC’s current Naval Mine Counter-Measures Project which is coming to a close in 2017.
To comment on this article, visit the Canadian Armed Facebook Notes